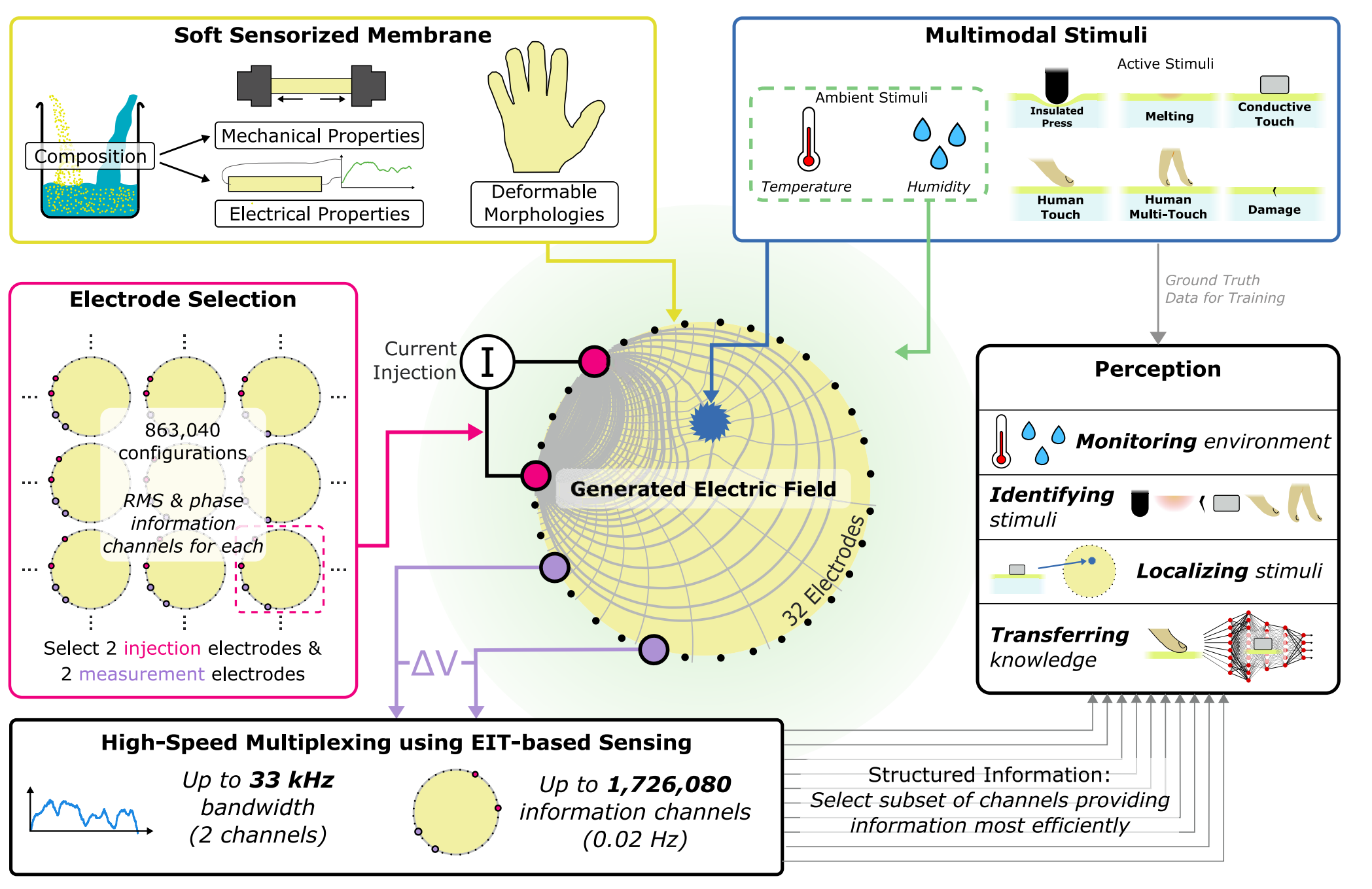
【《Science Robotics》, 2025年6月11日】Science Robotics刊登了来自剑桥大学团队的一项研究成果《Multimodal information structuring with single-layer soft skins and high-density electrical impedance tomography》。该研究用一块明胶基水凝胶,实现了172万个信息通道的触觉感知。研究人员只在材料边缘布置32个电极,通过电阻抗断层成像技术(EIT),就能监测863,040条不同的电流路径。这套系统可以同时识别6种不同类型的刺激:人体触摸、导电物体接触、绝缘物体按压、局部加热、损伤,甚至多点触摸。
现有多模态机器人皮肤的三大问题:制造繁琐、软硬界面容易损坏、信号干扰严重。传统方法依赖于在柔性基底中嵌入多个小型传感器组件,需要在大表面上分布和连接多个小组件,不仅制造过程复杂,还限制了皮肤只能做成简单形状,由于存在多个软硬界面,这些皮肤通常无法拉伸,或者极易损坏。剑桥团队的思路完全不同,他们把整块水凝胶变成了一个连续的传感场,通过在材料周围施加交流电,在内部形成复杂的电场分布。任何外界刺激如触摸、加热、损伤等都会改变局部导电性,进而改变电场。这项研究的核心贡献在于提出了一种新的传感器设计范式:用简单材料配合智能算法,而不是不断增加硬件复杂度。这种方法不仅降低了制造难度,还通过信息冗余提高了系统鲁棒性。
(南阳理工学院电子信息学科研究院马聪聪编译)