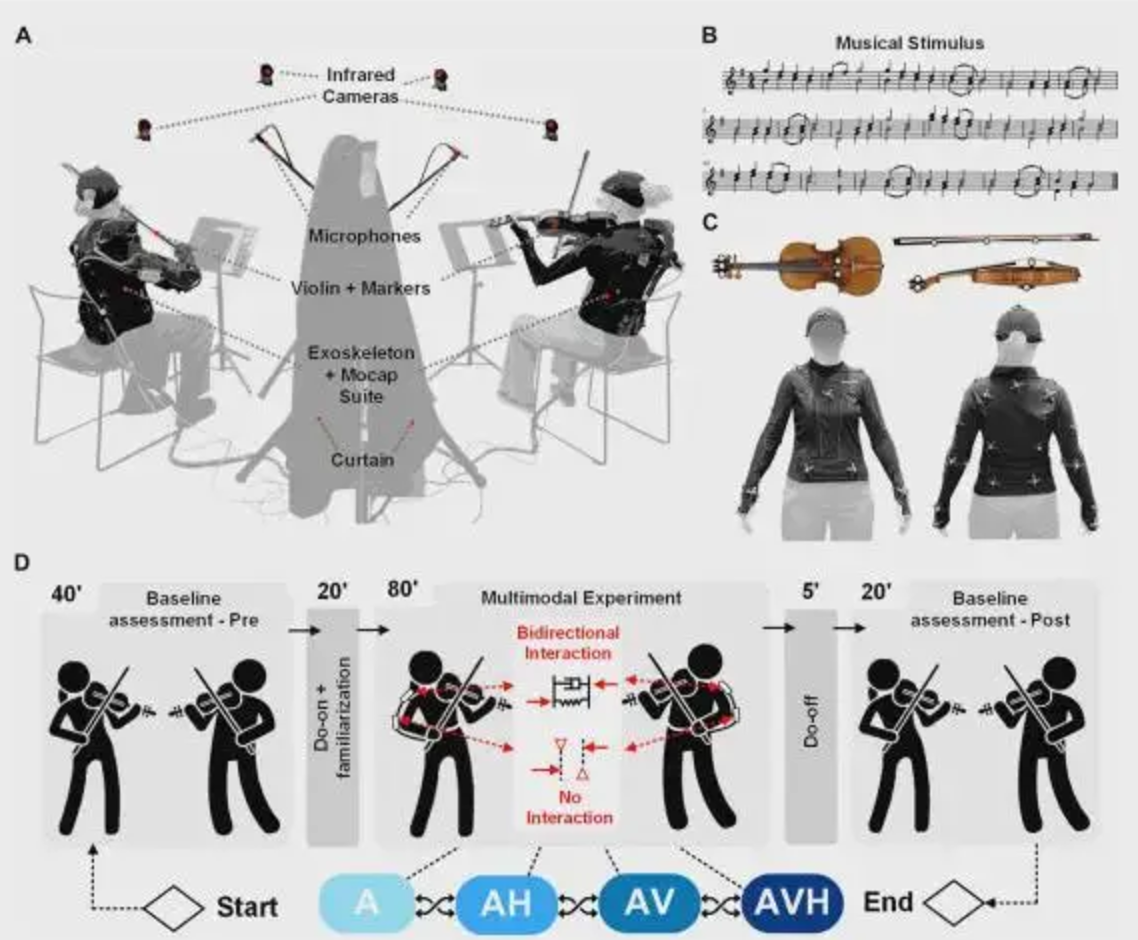
【《Science Robotics》, 2026年3月11日】Science Robotics刊登了来自比利时根特大学、意大利罗马生物医学大学等机构的研究团队的一项研究成果《Robot-mediated haptic feedback outperforms vision in violin duo coordination》。该研究开发了一套能够传递“触感”的机械外骨骼,让小提琴手们在合奏时能“感受”到彼此。这种由机器人介导的触觉反馈,在提升演奏协调性方面,其效果竟然远超我们长期依赖的视觉反馈,这不亚于为人类协作领域打开了一扇通往“第六感”的大门。
这套设备被设计得极为精巧,可以跟随小提琴家手臂的自然运动,包括肩部的内外旋和肘部的屈伸。它能实时测量佩戴者手臂的关节角度,并通过一个巧妙的粘弹性扭矩场,将一个人的动作信息转化为力,施加到另一个人的手臂上。AV(听觉+视觉)条件是现实生活中音乐家们最常用的协作方式。当用触觉反馈AH(听觉+触觉)取代视觉反馈(AV)后,演奏者们的协调性得到了大幅提升。与AV条件相比,AH条件下的弓法空间协调性提升了15%,AVH条件下更是提升了24%。即使乐手们互相看不见,仅仅依靠机器人传递的触觉,他们的动作一致性竟然比他们能看见对方时还要高。触觉沟通的“内隐性”和“具身性”,最直接的应用前景展现在专业技能培训领域。在音乐教学中,老师和学生佩戴这样的设备,学生能实时“感受”到老师运弓的力道和节奏,实现一种“手把手”的具身教学。同样,在外科手术训练、体育运动教学等需要精细动作配合的领域,这种技术也能让新手更快地领悟专家的“手感”。这项工作已经成功地将物理人-机-人交互的研究,从简单的实验室任务,推向了复杂、动态且有效的真实世界场景。
(南阳理工学院电子信息学科研究院马聪聪编译)