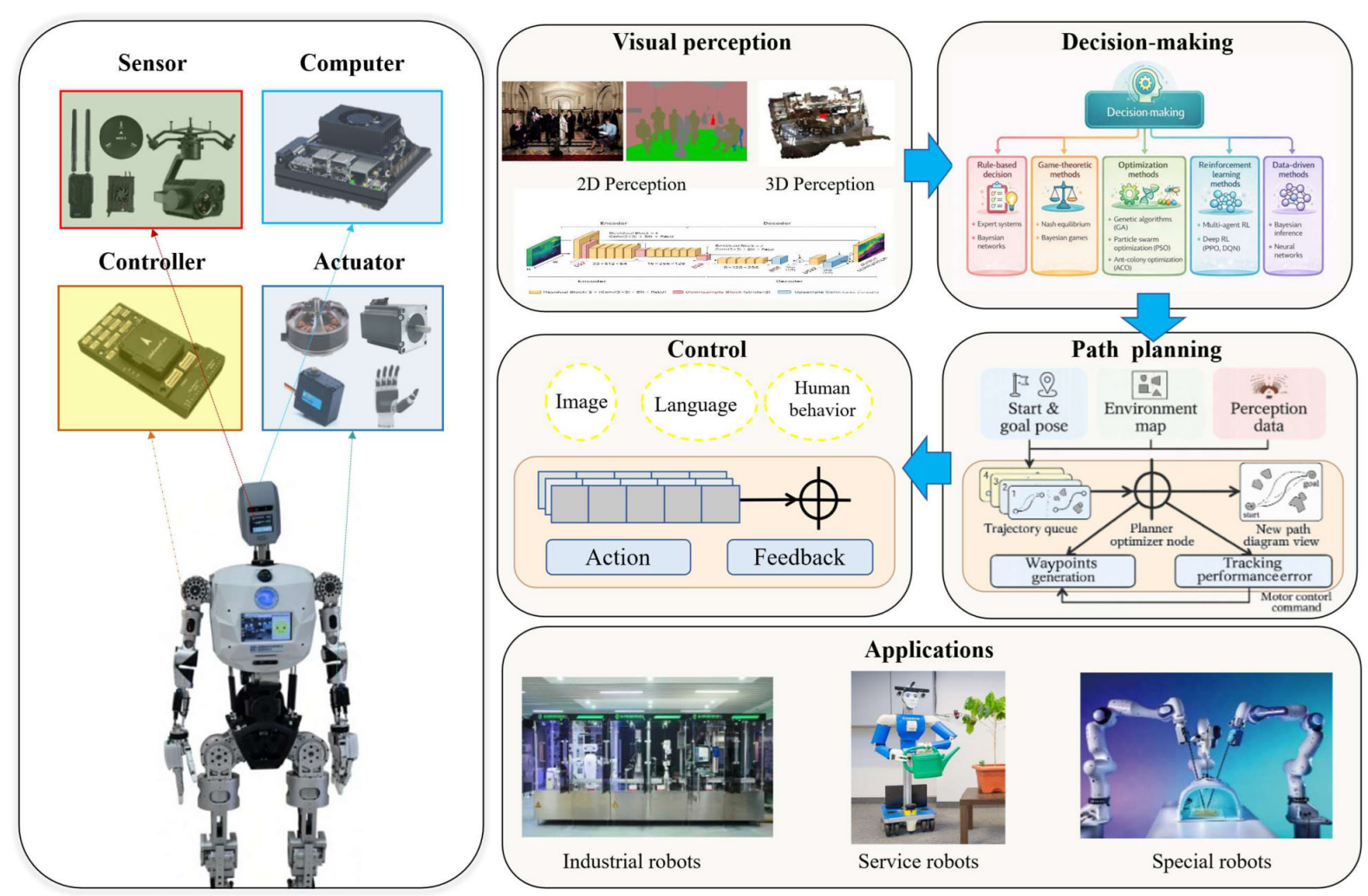
【《Visual Intelligence》, 2026年5月9日】Visual Intelligence刊登了来自湖南大学王耀南院士团队的一项研究综述《Intelligent Robot Systems: A Survey from the Perspective of Visual Intelligence》。具身智能是一种旨在实现“能思考、能感知、能行动”的智能系统,为推动机器人技术革新的核心驱动力,赋予机器人“感知-决策-行动-反馈”的完整闭环智能。智能机器人系统通常包含多个核心模块,以实现自主感知、决策与行动。文章从视觉智能视角出发,把典型的智能机器人系统分为视觉感知、决策、路径规划与控制四大模块。其中,视觉感知充当机器人的“眼睛”,负责采集环境与自身状态信息,包括视觉(如RGB/RGB-D相机、LiDAR数据)、力觉、触觉、听觉等多模态传感器信息;决策与路径规划基于感知数据进行任务理解、状态估计、行为选择和路径规划,构成机器人的“大脑”;控制技术则扮演机器人的“小脑”,将决策指令转化为物理动作,包含运动控制、驱动系统和末端执行器等。这些技术使得机器人不再是机械指令的执行者,而是能像人类一样通过身体与环境交互、自主学习,成为能够灵活适应的智能实体。
具身智能与机器人技术将朝着通用化、轻量化、低成本、人机共生的方向发展。随着大模型技术的持续迭代、传感器与机械制造技术的升级,具身智能机器人将突破单一任务局限,向通用智能机器人演进,能适应更多非结构化场景。
(南阳理工学院电子信息学科研究院马聪聪编译)