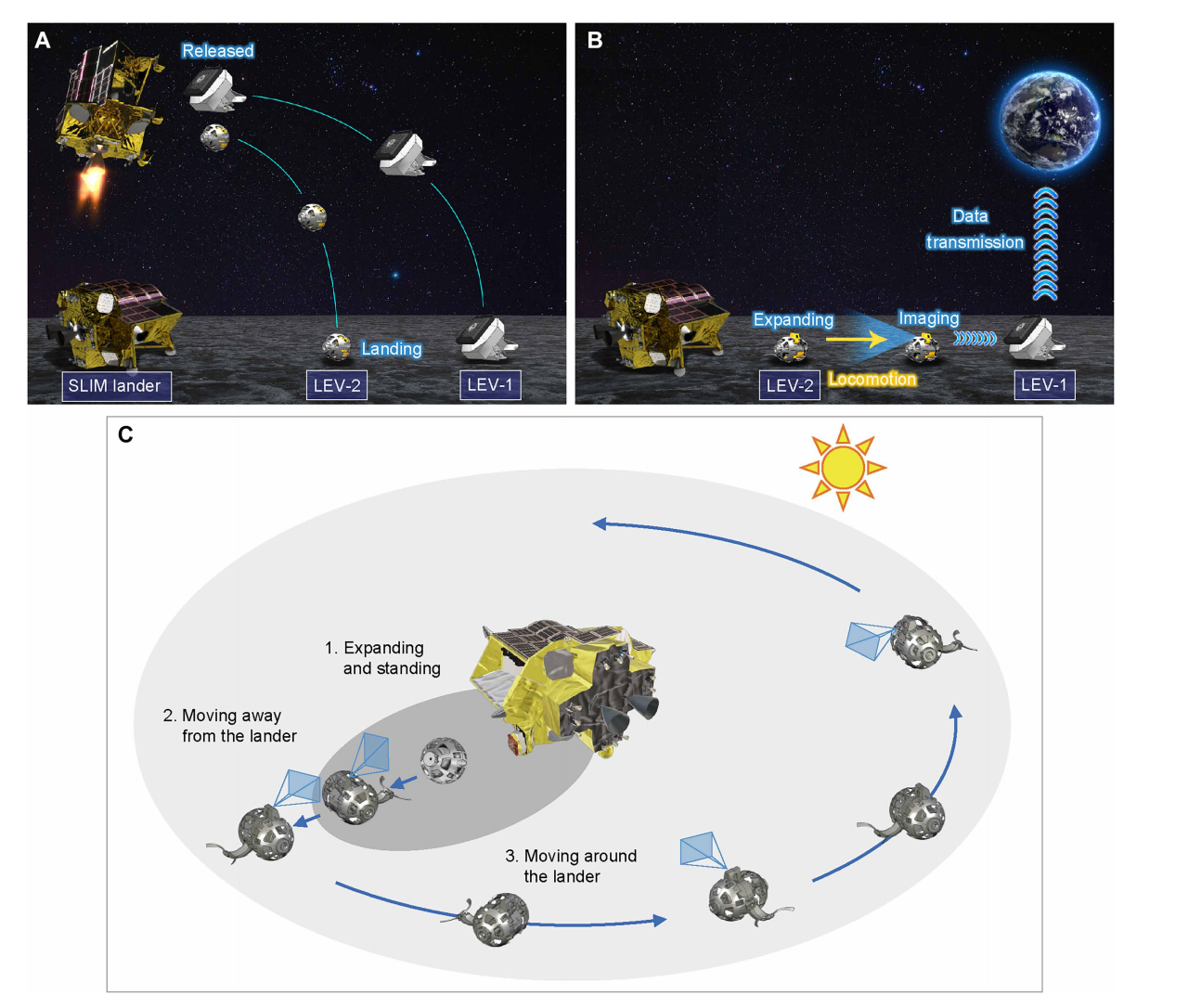
【《Science Robotics》, 2026年6月10日】Science Robotics刊登了来自日本宇宙航空研究开发机构(JAXA)联合索尼集团、TOMY公司的一项研究成果《From ball to rover: Transformable palm-sized rover SORA-Q for autonomous lunar exploration》。该成果详细记录了其在2024年1月19日随SLIM着陆器登陆月球后的自主探索表现。
SORA-Q的核心技术亮点包括:(1)极简变形机制,在收纳状态下为直径78毫米的球体,重量仅228克,仅需两台电机即可实现从球形到双轮车的展开;(2)偏心轮驱动,针对月球松软风化层,车轮采用偏心旋转设计,能放大车轮轨迹有效行程,周期性抬高底盘,降低陷入月壤的风险;(3)完全自主决策,受限于通信带宽,其无法实时传回大量数据,通过机载图像处理算法,评估图像质量并自主挑选最有价值的两张照片,通过中继探测器传回地球。
SORA-Q的成功验证了分布式行星探测的可行性,与传统“大而强”的单点探测路线不同,代表了“小而精”的策略。通过低成本、可承受失败的小型机器人编队,进入大型探测器无法到达的复杂地形(如洞穴、裂缝),与主系统协同作业。这一模式为未来火星、小行星等深空探测提供了更灵活、稳健且具成本效益的新路径。
(南阳理工学院电子信息学科研究院马聪聪编译)