【《农业机械学报》, 2025年9】 《农业机械学报》刊登了来自苗中华教授、赵春江院士等的论文《具身智能农业机器人关键技术与发展趋势》。该研究分析了全球农业智能化转型背景下,传统农业机器人面临非结构化环境、作业对象不确定性及控制参数时变等技术瓶颈。提出具身智能作为实现通用人工智能的关键路径,为突破上述瓶颈提供了新范式。
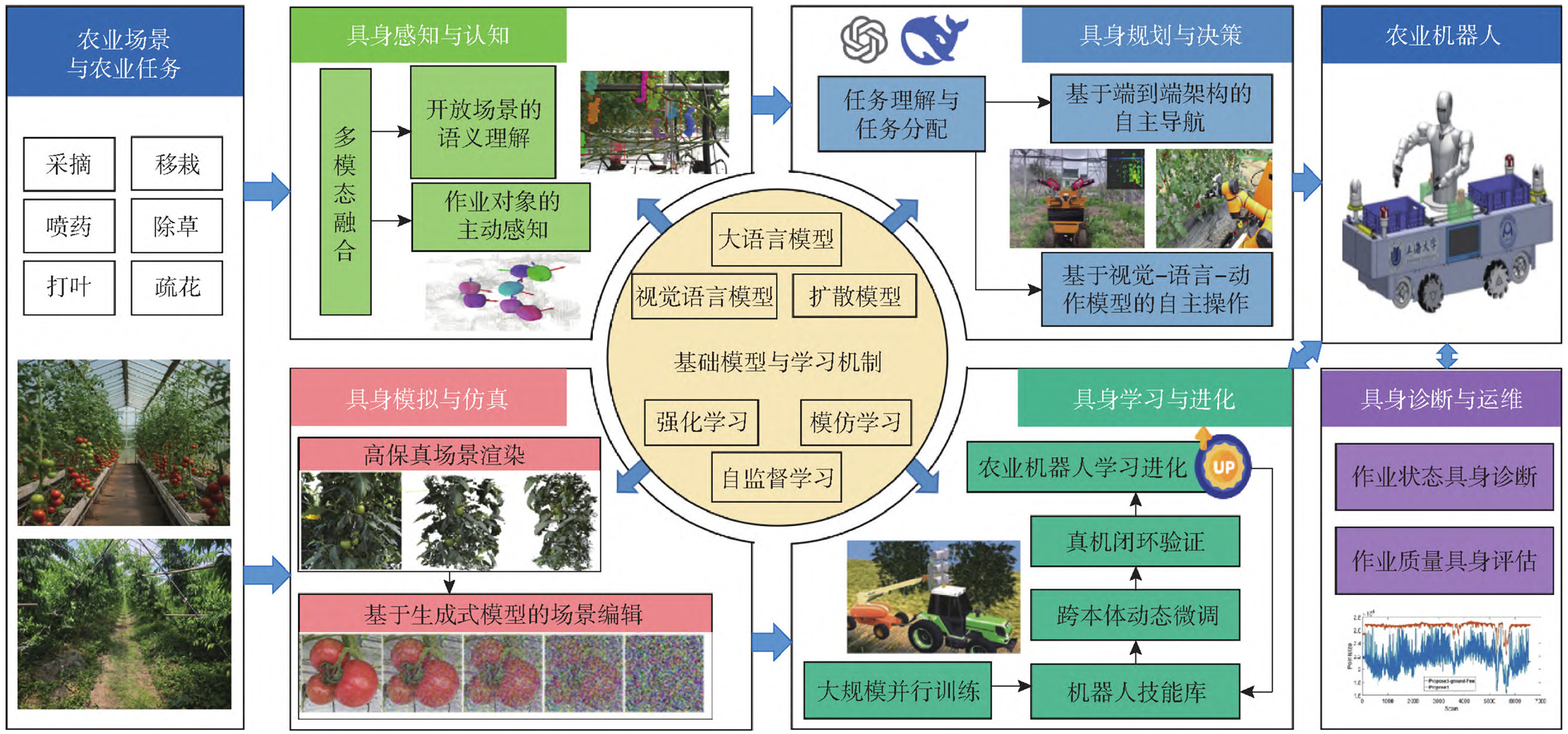
论文系统阐述具身智能理论驱动的农业机器人技术体系与发展路径,创新性构建“感知-决策-模拟-进化-诊断”五位一体研究框架。具体而言:具身感知聚焦开放环境场景理解、作业目标主动感知及多模态融合感知;具身决策涵盖端到端导航、大模型驱动的机械臂操作及多机协同算法;具身模拟着力于高保真场景重建、生成及虚实迁移技术;具身进化整合无监督学习、强化学习及模仿学习机制;具身诊断构建作业状态监测与质量评估体系。最后,展望未来发展方向,为农业4.0时代的农业机器人智能化升级提供理论支撑与技术路线。
(南阳理工学院电子信息学科研究院马聪聪编译)