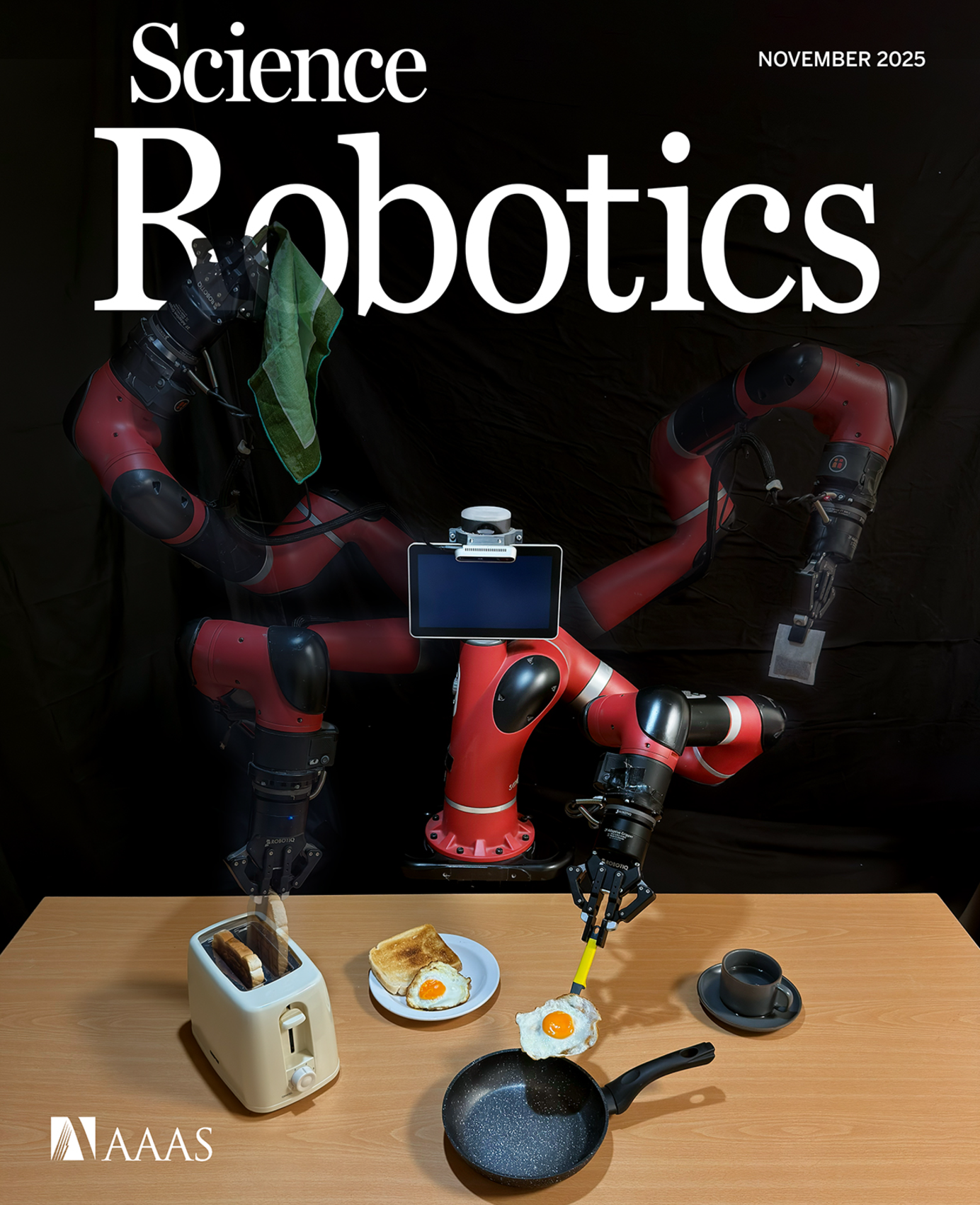
【《Science Robotics》, 2025年11月12日】Science Robotics封面文章刊登了来自帝国理工学院伦敦校区机器人学习实验室的一项研究成果《Learning a thousand tasks in a day》。人类可以通过模仿他人来学习技能,只需很少的演示,但机器人通常需要数百甚至数千次演示才能有效地成功完成任务。Dreczkowski等人开发了基于模仿学习的多任务轨迹转移,使操纵任务能够从每个演示中学习到。他们展示了如何在不到24小时的人类演示时间内,教机器人完成一千项不同的日常任务。
论文研究了提高学习效率的两个基本前提:将操作轨迹分解为顺序对齐和交互阶段,以及基于检索的泛化。通过3450个真实世界的部署,系统地研究了这种分解。在每个任务制度的少数演示中(<10个演示),分解在数据效率方面比单相学习提高了一个数量级,检索在对齐和交互方面始终优于行为克隆。
基于这些见解,研究人员开发了多任务轨迹转移(Multi-Task Trajectory Transfer,MT3),这是一种基于分解和检索的模仿学习方法。MT3只需一次演示就可以学习日常操作任务,同时还可以推广到以前未见过的对象实例。通过2200次额外的实际部署,揭示了MT3在不同任务系列中的能力和局限性。
(南阳理工学院电子信息学科研究院马聪聪编译)